Thread wrapper class for communicating with the serial device on a separate thread.
More...
#include <frameThread.hh>
|
| void | info (const QString &info) |
| | Signal emmitted to add informations to logs. More...
|
| |
| void | error (const QString &error) |
| | Signal emmitted to add errors on the status bar. More...
|
| |
| void | setSerialStatus (const QString &message) |
| | Signal emmitted to change connection status with the serial device on the status bar. More...
|
| |
Definition at line 26 of file frameThread.hh.
◆ FrameThread()
| FrameThread::FrameThread |
( |
Communication * |
communication = nullptr, |
|
|
QObject * |
parent = nullptr |
|
) |
| |
◆ error
| void FrameThread::error |
( |
const QString & |
error | ) |
|
|
signal |
- Parameters
-
| [out] | error | Error message string. |
◆ info
| void FrameThread::info |
( |
const QString & |
info | ) |
|
|
signal |
- Parameters
-
| [out] | info | Info message string. |
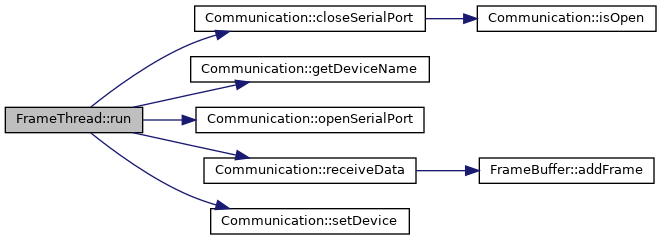
◆ run()
| void FrameThread::run |
( |
| ) |
|
|
override |
◆ setSerialStatus
| void FrameThread::setSerialStatus |
( |
const QString & |
message | ) |
|
|
signal |
- Parameters
-
| [out] | message | Serial status message. |
◆ _communication
The documentation for this class was generated from the following files: